AlmaCore Settings
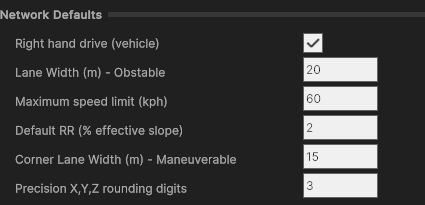
Network Defaults
| Property | Description |
|---|---|
| Maximum speed limit (kph) | Default segment max speed. Set segment to -1kph to reset. |
| Default RR (% effective slope) | Default rolling resistance. Set segment to -1% to reset. |
| Right hand drive (vehicle) | Used for road curvature and stop sign calculations. |
| Corner Lane Width (m) | Lane width for curvature and lateral acceleration limits. |
| Lane Width (m) - Obstacle | Lane width for upper speed limits during passage. |
| Precision X,Y,Z rounding digits | Digits to round CSV coordinate inputs. |
| Path finding by distance | Experimental: prefers distance over travel time. |
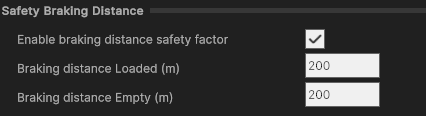
Braking Distance
| Property | Description |
|---|---|
| Enable braking distance safety factor | Restricts top speed so truck stops within specified distance at 100% retard/braking. |
| Braking distance Loaded (m) | Max speed for safe loaded stop using 100% retard. Dynamically adjusts retard %. |
| Braking distance Empty (m) | Max speed for safe empty stop using 100% retard. Dynamically adjusts retard %. |
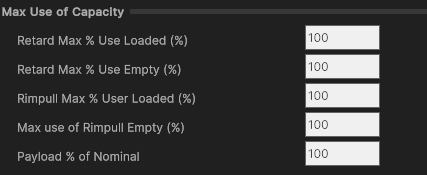
Max Capacity Usage
| Property | Description |
|---|---|
| Retard Max % Use Loaded (%) | Maximum retard capacity use when loaded. |
| Retard Max % Use Empty (%) | Maximum retard capacity use when empty. |
| Rimpull Max % Use Loaded (%) | Maximum rimpull capacity use when loaded. |
| Max use of Rimpull Empty (%) | Maximum rimpull capacity use when empty. |
| Payload % of Nominal | Adjusts payload so GVW = EVW + Nominal × factor%. |
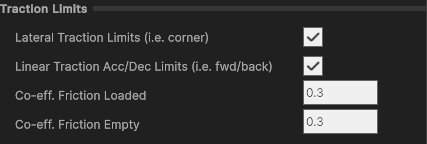
Traction Limits
| Property | Description |
|---|---|
| Lateral Traction Limits (corner) | Limits lateral acceleration using traction coeff, truck weight, corner radius. |
| Linear Traction Limits (fwd/back) | Limits acceleration/deceleration using traction coeff and forces. Lowest limit prevails. |
| Co-eff. Friction Loaded | Traction/friction coefficient when loaded for accel limits. |
| Co-eff. Friction Empty | Traction/friction coefficient when empty for accel limits. |
Acceleration Limits
| Property | Description |
|---|---|
| Enable Behaviour Acceleration limits | Upper limits on acceleration/deceleration to mimic operator behaviour. |
| Loaded Accel. Limit (kph/s) | Linear acceleration limit when loaded under propulsion. |
| Empty Accel. Limit (kph/s) | Linear acceleration limit when empty under propulsion. |
| Loaded Decel. Limit (kph/s) | Linear deceleration limit when loaded under braking. |
| Empty Decel. Limit (kph/s) | Linear deceleration limit when empty under braking. |
Speed Thresholds

| Property | Description |
|---|---|
| Max mechanical braking speed (kph) | Speed threshold for mechanical braking as electrical retard approaches zero. |
| Min non-zero speed (kph) | Prevents infinite loops from invalid speed calculations. |
Behaviour
| Property | Description |
|---|---|
| Accel. Transition-on | Enables throttle-on transition. Requires Operator Behaviour module from AlmaCore. |
| Accel. Transition-off | Enables throttle-off transition. Requires Operator Behaviour module from AlmaCore. |
| Decel. Transition-on | Enables braking-on transition. Requires Operator Behaviour module from AlmaCore. |
| Decel. Transition-off | Enables braking-off transition. Requires Operator Behaviour module from AlmaCore. |